-
 江蘇貿易機器人價目
江蘇貿易機器人價目大工作速度通常指機器人操作臂末端的速度。提高速度可提高工作效率,因此提高機器人的加速減速能力,保證機器人加速減速過程的平穩性是非常重要的。承載能力承載能力是指機器人在工作范圍內的任何位姿上所能承受的大質量。機器人的載荷不僅取決于負載的質量,而且還與機器人運行的...
2025-08-19 -
 閔行區出口智能工廠解決方案調節
閔行區出口智能工廠解決方案調節智能工廠的優劣勢據了解,智能工廠的建立不僅有利于提高資產效率、生產質量,降低企業成本,還能營造更更安全的生產過程,保持生產的可持續性等好處。這主要表現在以下五個方面:1、資產效率智能工廠的每個方面都會產生大量數據,通過持續分析,可以發現可能需要某種糾正優化的資...
2025-08-19 -
 奉賢區綜合機器人特點
奉賢區綜合機器人特點隨著技術的成熟,機器人和人們的生活的關系越來越密切,智能家居成為當下非常熱門的話題,掃地機器人算是智能家居推廣的先行者,將機器人技術引入住宅可以使生活更加安全舒心,尤其家里有老人和兒童,智能的家居和家政機器人可以起到自動操作調整模式并保障安全的作用。上海機器人...
2025-08-18 -
 徐匯區綜合自動化設備防水
徐匯區綜合自動化設備防水對社會的影響 自動化是新的技術一個重要方面。自動化技術的研究、應用和推廣,對人類的生產、生活等方式將產生深遠影響。生產過程自動化和辦公室自動化可極大地提高社會生產率和工作效率,節約能源和原材料消耗,保證產品質量,改善勞動條件,改進生產工藝和管理體制,加速社會的...
2025-08-18 -
 江蘇貿易智能工廠解決方案設置
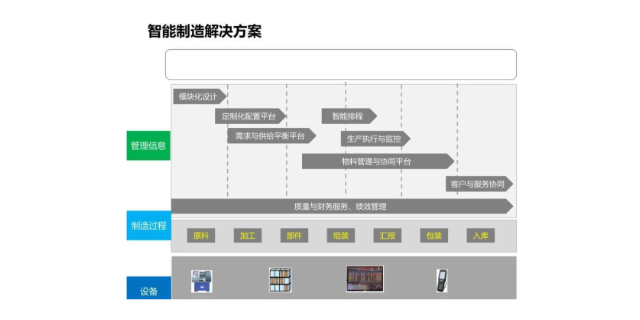
江蘇貿易智能工廠解決方案設置三、優點智能化工廠的實現可以帶來以下幾個方面的優點:提高生產效率:智能化工廠可以實現生產自動化控制和協調,從而提高生產效率。降低生產成本:智能化工廠可以減少人工投入,降低生產成本。提高產品質量:智能化工廠可以實現對生產過程的實時監控和自動化控制,從而提高產品質...
2025-08-18 -
 嘉定區國產智能工廠解決方案經歷
嘉定區國產智能工廠解決方案經歷智能工廠的優劣勢據了解,智能工廠的建立不僅有利于提高資產效率、生產質量,降低企業成本,還能營造更更安全的生產過程,保持生產的可持續性等好處。這主要表現在以下五個方面:1、資產效率智能工廠的每個方面都會產生大量數據,通過持續分析,可以發現可能需要某種糾正優化的資...
2025-08-18 -
長寧區威力智能工廠解決方案設置
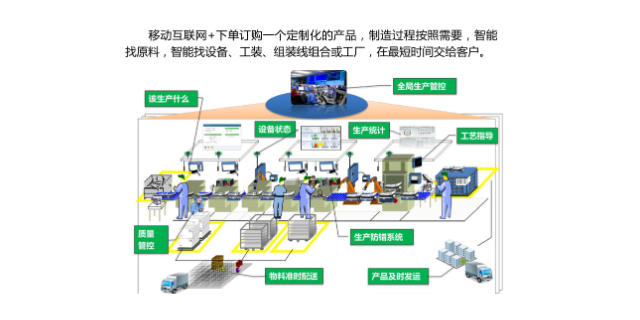
現在越來越多企業,都比較注重數字化轉型,智能工廠是當今先進制通過數字化技術和物聯網技術等手段,實現生產過程的智能自動化,提高了生產效率和品質,降低了生產成本,智能工廠方案對企業管理帶來了諸多優勢。一、實時監控提高生產效率通過將各個生產環節連接到一起,智能工廠方...
2025-08-18 -
江蘇威力智能工廠解決方案特點
到了1914年夏天,新的流水裝配線已能在1小時33分鐘內完成裝配。并且,隨著流水線工程的不斷完善,福特工廠的工效紀錄每一天都在刷新,年產量從788輛一路飛升,到了第四年已經達到了73萬輛。福特生產的汽車也許并未超越當時的技術水平,但福特生產出的這套生產方式,標...
2025-08-18 -
 浦東新區進口自動化設備檢修
浦東新區進口自動化設備檢修自動化的對象變為大規模、復雜的工程和非工程系統,涉及許多用現代控制理論難以解決的問題。這些問題的研究,促進了自動化的理論、方法和手段的革新,于是出現了大系統的系統控制和復雜系統的智能控制,出現了綜合利用計算機、通信技術、系統工程和人工智能等成果的高級自動化系統...
2025-08-18 -
 長寧區通用機器人操作
長寧區通用機器人操作機器人的年產量達6000臺,KUKA上月在松江的新工廠已開工,預計到2015年產能可達5000臺。上海將拓展機器人系統集成應用,使上海發展成為我國的機器人產業基地、機器人技術研發中心、制造中心、服務中心和應用中心。機器人學國家重點實驗室(State Key L...
2025-08-17 -
金山區威力自動化設備推廣
由于電子計算機的應用,出現了數控機床、加工中心、機器人、計算機輔助設計、計算機輔助制造、自動化倉庫等。研制出適應多品種、小批量生產型式的柔性制造系統(FMS)。以柔性制造系統為基礎的自動化車間,加上信息管理、生產管理自動化,出現了采用計算機集成制造系統(CIM...
2025-08-17 -
 黃浦區品牌智能工廠解決方案檢修
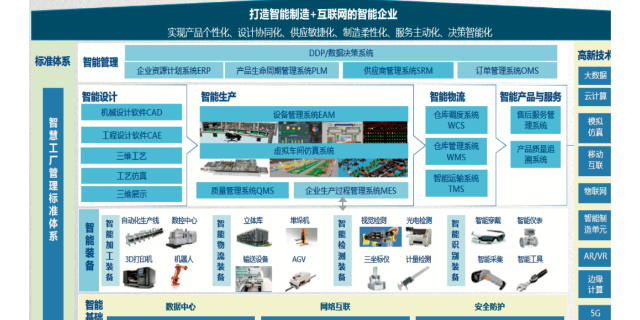
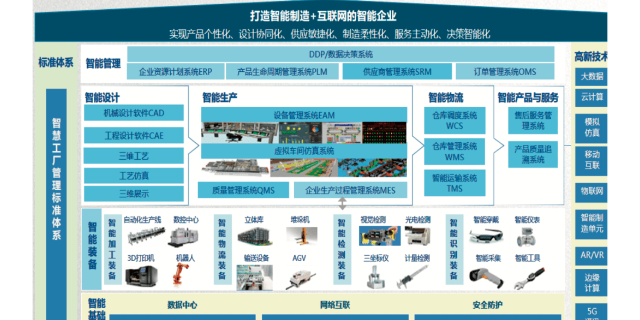
黃浦區品牌智能工廠解決方案檢修1、制造資源現實世界的物理實體,例如文件、圖紙、設備、車間、工廠等,人員也可視為制造資源的一個組成部分。22、系統集成通過二維碼、射頻識別、軟件、網絡等信息技術集成原材料、零部件、能源、設備等各種制造資源。由小到大實現從智能裝備/產品到智能生產單元、智能生產線...
2025-08-17 -
 閔行區質量智能工廠解決方案調節
閔行區質量智能工廠解決方案調節4、安全和可持續性智能工廠還可以為勞動保健和環境可持續性帶來真正的好處。更大的流程自主性可以減少人為錯誤的可能性,包括造成傷害的事故。利用物聯網技術實現設備間高效的信息互聯,數字工廠向“物聯工廠”升級,操作人員可實現獲取生產設備、物料、成品燈相互間的動態生產數...
2025-08-17 -
 閔行區國產機器人特點
閔行區國產機器人特點1967年日本召開的一屆機器人學術會議上,人們提出了兩個有代表性的定義。一是森政弘與合田周平提出的:“機器人是一種具有移動性、個體性、智能性、通用性、半機械半人性、自動性、奴隸性等7個特征的柔性機器”。從這一定義出發,森政弘又提出了用自動性、智能性、個體性、半...
2025-08-17 -
寶山區進口智能工廠解決方案防水
4、安全和可持續性智能工廠還可以為勞動保健和環境可持續性帶來真正的好處。更大的流程自主性可以減少人為錯誤的可能性,包括造成傷害的事故。利用物聯網技術實現設備間高效的信息互聯,數字工廠向“物聯工廠”升級,操作人員可實現獲取生產設備、物料、成品燈相互間的動態生產數...
2025-08-17 -
徐匯區質量機器人特點
在特種機器人中,有些分支發展很快,成體系的趨勢,如服務機器人、水下機器人機器人、微操作機器人等。 [3]工業機器人按臂部的運動形式分為四種。直角坐標型的臂部可沿三個直角坐標移動;圓柱坐標型的臂部可作升降、回轉和伸縮動作;球坐標型的臂部能回轉、俯仰和伸縮;關節型...
2025-08-17 -
黃浦區綜合自動化設備推廣
●擴展柔性 當生產需要的時候,可以很容易地擴展系統結構,增加模塊,構成一個更大系統的能力。●運行柔性 利用不同的機器、材料、工藝流程來生產一系列產品的能力和同樣的產品,換用不同工序加工的能力。柔性制造系統是有一個由計算機集成管理和控制的、用于高效率地制造中小批...
2025-08-17 -
虹口區通用自動化設備特點
《關于印發“十四五”數字經濟發展規劃的通知》深化重點產業數字化轉型,深入實施智能制造工程,大力推動裝備數字化,開展智能制造試點示范專項行動,完善國家智能制造標準體系。2021年12月財政部、工業和信息化部等部門《關于2022年新能源汽車推廣應用財政補貼政策的通...
2025-08-17 -
 青浦區通用自動化設備設置
青浦區通用自動化設備設置柔性制造技術是對各種不同形狀加工對象實現程序化柔性制造加工的各種技術的總和。柔性制造技術是技術密集型的技術群,凡是側重于柔性,適應于多品種、中小批量(包括單件產品)的加工技術都屬于柔性制造技術。柔性可以表述為兩個方面。方面是系統適應外部環境變化的能力,可用系統...
2025-08-17 -
黃浦區通用機器人檢修
大多數機器人從總體上看是個開鏈機構,但其中可能包含有局部閉環機構。閉環機構可提高剛性,但限制了關節的活動范圍,因而會使工作空間減小。定位精度機器人精度包括定位精度和重復定位精度。定位精度是指機器人手部實際到達位置與目標位置的差異。重復定位精度是指機器人重復定位...
2025-08-17 -
 楊浦區貿易機器人風格
楊浦區貿易機器人風格腕部參考點運動所形成的軌跡表面是半徑為r的球面的一部分,以θ、φ、r為坐標,任意點可表示為P=f(θ,φ,r)。這類機器人占地面積小,工作空間較大,移動關節不易防護。 SCARA機器人有3個旋轉關節,其軸線相互平行,在平面內進行定位和定向,另一個關節是移動關節...
2025-08-17 -
長寧區綜合智能工廠解決方案調節
說起智能工廠,必須從1913年美國福特啟用全廠輸送系統開始講起。這個項目從1907年開始萌芽,但一直到1913年才正式投入大規模生產,全新的生產方式開始運作后,福特工廠生產一臺車的時間由12.5個工時減少為5小時50分鐘。到了1914年夏天,新的流水裝配線已能...
2025-08-17 -
普陀區自制機器人調節
關于機器人的分類,國際上沒有制定統一的標準,從不同的角度可以有不同的分類。發展階段①一代機器人:示教再現型機器人。1947年,為了搬運和處理核燃料,美國橡樹嶺國家實驗室研發了世界上一臺遙控的機器人。1962年美國又研制成功PUMA通用示教再現型機器人,這種機器...
2025-08-17 -
閔行區威力機器人經歷
工作范圍工作范圍是指機器人操作臂末端或手腕中心所能到達的所有點的,也叫做工作區域。因為末端執行器的形狀和尺寸是多種多樣的,為了真實反映機器人的特征參數,所以是指不安裝末端執行器時的工作區域。工作范圍的形狀和大小是十分重要的。機器人在執行某一作業時,可能會因為存...
2025-08-16 -
寶山區品牌機器人設置
應用環境國際上的機器人學者,從應用環境出發將機器人分為兩類:制造環境下的工業機器人和非制造環境下的服務與仿人型機器人。 [3]中國的機器人從應用環境出發,將機器人也分為兩大類,即工業機器人和特種機器人。這和國際上的分類是一致的。工業機器人是指面向工業領域的多關...
2025-08-16 -
松江區貿易自動化設備價目
●擴展柔性 當生產需要的時候,可以很容易地擴展系統結構,增加模塊,構成一個更大系統的能力。●運行柔性 利用不同的機器、材料、工藝流程來生產一系列產品的能力和同樣的產品,換用不同工序加工的能力。柔性制造系統是有一個由計算機集成管理和控制的、用于高效率地制造中小批...
2025-08-16 -
 金山區貿易自動化設備價目
金山區貿易自動化設備價目檢查繼電器,流量控制閥,壓力控制閥繼電器和磁感應式傳感器一樣,長期使用也會出現搭鐵粘連的情況,從而無法保證電氣回路的正常,需要更換。在氣動或液壓系統中,節流閥開口度和壓力閥的壓力調節彈簧,也會隨著設備的震動而出現松動或滑動的情況。這些裝置與傳感器一樣,在設備中...
2025-08-16 -
虹口區綜合機器人經歷
實驗室堅持對外開放,吸引國內外學者開展交流與合作研究。通過設立基金課題,實驗室與國內有關從事機器人學研究的近30所大學、研究所和企業建立了聯系,幾乎涵蓋國內從事機器人學研究的所有單位。實驗室結合自身的發展方向,有針對性地與國內外科研團隊建立合作關系。這些合作,...
2025-08-16 -
靜安區品牌自動化設備推廣
●機器柔性 當要求生產一系列不同類型的產品時,機器隨產品變化而加工不同零件的難易程度。●工藝柔性 一是工藝流程不變時自身適應產品或原材料變化的能力;二是制造系統內為適應產品或原材料變化而改變相應工藝的難易程度。●產品柔性 一是產品更新或完全轉向后,系統能夠非常...
2025-08-16 -
寶山區品牌機器人特點
腕部參考點運動所形成的軌跡表面是半徑為r的球面的一部分,以θ、φ、r為坐標,任意點可表示為P=f(θ,φ,r)。這類機器人占地面積小,工作空間較大,移動關節不易防護。 SCARA機器人有3個旋轉關節,其軸線相互平行,在平面內進行定位和定向,另一個關節是移動關節...
2025-08-16