山東需求分析系統建模優勢有哪些
機器人領域基于模型設計(MBD)工具需適配多域控制特性,涵蓋動力學建模、控制算法設計與代碼生成功能。動力學建模工具應能構建機械臂DH參數模型,自動計算運動學正逆解,模擬不同關節角度下的末端位置,支持重力補償、摩擦力矩等動力學特性分析,為控制算法設計提供精確植物模型。控制算法設計工具需具備圖形化建模能力,支持PID控制、模型預測控制(MPC)等算法的搭建與仿真,可快速驗證軌跡跟蹤、力控柔順等控制策略效果——如協作機器人開發中,能模擬人機交互時的力反饋控制邏輯。代碼生成工具需能將控制模型轉化為可在ROS/RTOS等機器人控制器上運行的實時代碼,支持代碼優化以滿足毫秒級甚至微秒級控制周期需求。此外,支持多工具聯合仿真的工具更具優勢,能實現動力學模型與控制算法模型的無縫集成,驗證整個機器人系統的動態響應,保障MBD流程的連貫性與有效性。電子與通信領域MBD,以模型串聯需求至部署,助力系統優化,加速產品落地。山東需求分析系統建模優勢有哪些

智能交通系統基于模型設計的好用軟件,需具備交通流建模、信號控制邏輯仿真等功能。在交通流量預測模塊,應能整合歷史車流量數據與實時路況信息,構建宏觀交通流模型,準確計算不同時段的道路通行能力,為信號配時優化提供數據支撐。針對智能路口控制,軟件需支持信號燈相位切換邏輯的可視化建模,模擬不同配時方案下的車輛延誤時間,通過對比分析選出合理控制策略。車路協同仿真功能也不可或缺,能搭建車輛與路側設備的通信模型,驗證信息交互延遲對協同決策的影響,確保自動駕駛車輛在復雜交通場景中的響應可靠性。好用的軟件還應具備開放的模型接口,可與交通監控系統、車輛導航平臺的數據對接,實現仿真結果與實際交通狀況的動態校準,提升模型對智能交通系統設計的指導價值。青海自動駕駛系統建模優勢有哪些汽車領域MBD優勢體現在全流程,從控制器到整車仿真靠模型串聯,迭代快且少出岔子。
機械臂DH參數建模MBD借助圖形化建模工具,將機械臂的連桿長度、關節轉角、連桿偏距等結構參數轉化為規范化的運動學模型,實現對機械臂運動軌跡的準確仿真。在建模過程中,按照DH法則確立各連桿的坐標系,通過矩陣運算構建相鄰關節間的變換關系,從而自動求解機械臂末端執行器在三維空間中的位姿。基于MBD流程,可對DH參數進行參數化調整,仿真不同參數組合下機械臂的工作空間范圍與運動靈活性,快速篩選出符合設計需求的結構參數。對于多關節機械臂,需構建包含全部DH參數的整體運動學模型,考慮關節間的耦合效應,模擬復雜運動軌跡下各關節的角度變化曲線,為軌跡規劃算法的開發提供精確的仿真對象,同時可銜接動力學分析模塊,計算不同運動狀態下的關節驅動力矩,為機械臂的結構優化與驅動選型提供數據支撐。
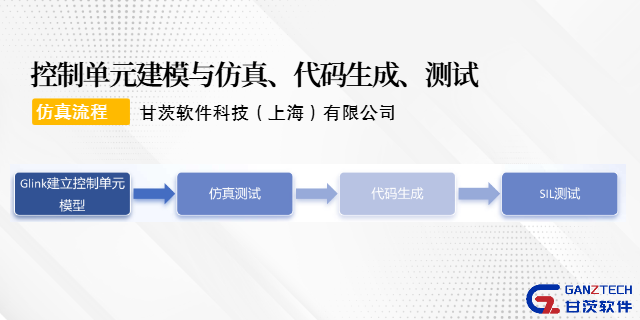
判斷MBD開發公司的優劣需從行業適配性、技術實力與服務完整性等方面綜合考量。專業公司應深耕汽車、工業自動化等領域,具備豐富的工程經驗,在汽車電子領域,能深刻理解ECU、VCU、域控制器等的開發流程,提供符合ISO26262功能安全標準的MBD服務,覆蓋從需求分析、模型搭建到代碼生成、測試驗證的全流程。針對工業機器人領域,公司需精通機械臂動力學建模、控制算法設計,能協助客戶構建包含DH參數的運動學模型,優化軌跡規劃與力控策略。技術實力體現在工具鏈整合能力上,能根據客戶需求選擇合適的建模與仿真工具,實現不同工具間的模型無縫遷移,同時提供定制化的模型庫與算法模塊。服務完整性方面,具備硬件在環(HIL)測試實施能力的公司更具優勢,可將虛擬模型與物理硬件對接驗證。甘茨軟件科技通過ISO26262道路車輛安全管理體系ASIL-D認證,在汽車領域MBD開發中具備專業優勢。汽車控制器軟件MBD用途多,可實現邏輯可視化建模與仿真,助力快速驗證與迭代。
車載通信系統建模聚焦于車內各類網絡的信號傳輸邏輯與可靠性驗證,覆蓋CAN/LIN總線、車載以太網等多種通信方式。CAN總線建模需定義報文ID、數據長度與傳輸周期,通過構建總線調度模型,計算不同節點(如發動機ECU、ABS控制器)的報文發送錯誤概率,優化總線負載率以確保關鍵信號(如制動指令)的實時性。LIN總線建模針對車身電子等低速率場景,模擬主從節點的通信協議,驗證燈光、雨刮等控制信號的傳輸延遲,避免因通信延遲導致的功能異常。車載以太網建模則需考慮高帶寬需求,構建通信協議棧模型,仿真自動駕駛多傳感器(激光雷達、攝像頭)的海量數據傳輸過程,分析網絡擁塞對數據同步的影響。建模過程需整合通信硬件特性(如傳輸速率、抗干擾能力),通過仿真模擬電磁干擾、線束阻抗變化等工況,驗證通信系統的容錯能力,確保車內信號傳輸的穩定性與安全性。高校基礎研究MBD開發優勢,在于將理化生物過程具象化,便于直觀分析與成果轉化。青海自動駕駛系統建模優勢有哪些
工程類專業教學實驗系統建模,能幫學生把理論變直觀模型,動手操作學得快、練本事。山東需求分析系統建模優勢有哪些
汽車領域整車操縱穩定性仿真MBD工具需聚焦車身姿態控制、輪胎地面相互作用的準確建模。這類工具應能構建多體動力學模型,精確描述懸架系統的彈性特性、轉向系統的傳動特性,模擬側傾、俯仰等車身運動,計算不足轉向度、穩態回轉特性等關鍵指標。工具需具備輪胎模型庫,支持不同路面附著系數下的輪胎力學特性仿真,分析輪胎側偏角對整車轉向響應的影響。此外,應支持與駕駛員模型聯合仿真,模擬不同駕駛風格下的整車操縱表現,通過虛擬試驗場驗證車輛在極限工況下的穩定性。甘茨軟件科技(上海)有限公司作為專注工業軟件的企業,在車輛的動力學模型運動和響應分析方面有實踐積累,其相關工具可應用于汽車領域整車操縱穩定性仿真MBD中。山東需求分析系統建模優勢有哪些
- 廣西動力系統汽車模擬仿真測試軟件 2025-08-19
- 河北神經網絡控制算法哪個軟件好 2025-08-19
- 廣東汽車電子開發科學計算怎么優化 2025-08-19
- 沈陽邏輯算法有哪些靠譜平臺 2025-08-19
- 上海圖形化建模系統建模有哪些工具 2025-08-19
- 西藏新能源汽車電池科學分析軟件推薦 2025-08-19
- 西藏汽車工業科學分析國產工具 2025-08-19
- 福建仿真驗證系統建模用什么工具 2025-08-19
- 長春電池系統汽車仿真軟件服務商 2025-08-19
- 江西汽車控制器軟件系統建模的開發優勢 2025-08-19
- 南京潛影防偽標識產業 2025-08-19
- 河北紙質合格證打印機 2025-08-19
- 上海3D攝像頭模組廠商 2025-08-19
- 宿遷哪里有共享無線充咨詢問價 2025-08-19
- 虹口區出口機器人操作 2025-08-19
- 四川流程制造APS軟件 2025-08-19
- 虹口區網絡營銷企劃一體化 2025-08-19
- 廣州2U單路服務器哪家好 2025-08-19
- 大興安嶺庫存管理系統U8軟件服務企業資金帳戶 2025-08-19
- 貴州智慧商場商管ERP軟件廠家 2025-08-19